Sari on Science
Do-it-yourself robotic hand.
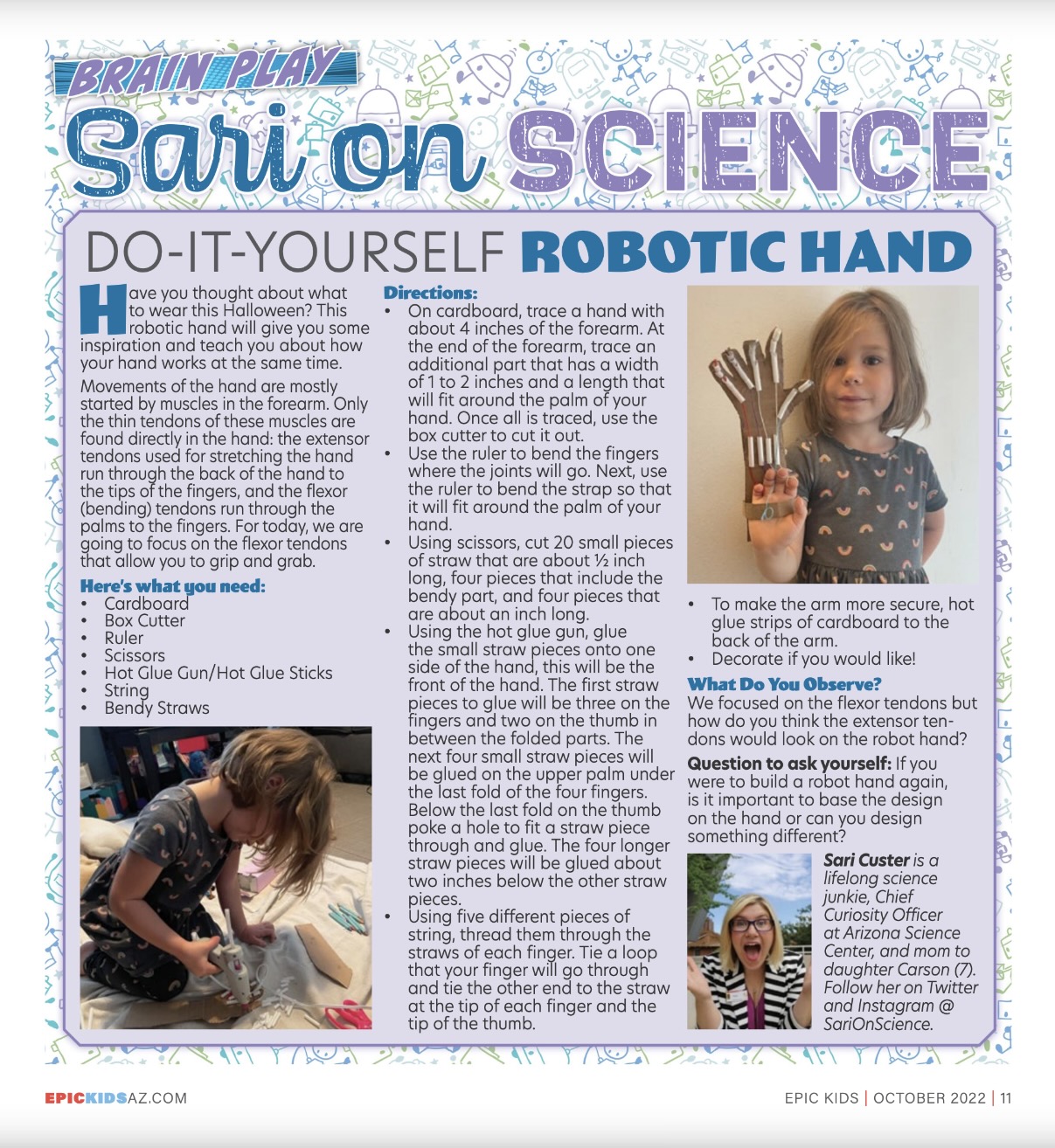
Have you thought about what to wear this Halloween? This robotic hand will give you some inspiration and teach you about how your hand works at the same time.
Movements of the hand are mostly started by muscles in the forearm. Only the thin tendons of these muscles are found directly in the hand: the extensor tendons used for stretching the hand run through the back of the hand to the tips of the fingers, and the flexor (bending) tendons run through the palms to the fingers. For today, we are going to focus on the flexor tendons that allow you to grip and grab.
Here’s what you need:
- Cardboard
- Box Cutter
- Ruler
- Scissors
- Hot Glue Gun/Hot Glue Sticks
- String
- Bendy Straws
On cardboard, trace a hand with about 4 inches of the forearm. At the end of the forearm, trace an additional part that has a width of 1 to 2 inches and a length that will fit around the palm of your hand. Once all is traced, use the box cutter to cut it out.
Use the ruler to bend the fingers where the joints will go. Next, use the ruler to bend the strap so that it will fit around the palm of your hand.
Using scissors, cut 20 small pieces of straw that are about ½ inch long, four pieces that include the bendy part, and four pieces that are about an inch long.
Using the hot glue gun, glue the small straw pieces onto one side of the hand, this will be the front of the hand. The first straw pieces to glue will be three on the fingers and two on the thumb in between the folded parts. The next four small straw pieces will be glued on the upper palm under the last fold of the four fingers. Below the last fold on the thumb poke a hole to fit a straw piece through and glue. The four longer straw pieces will be glued about two inches below the other straw pieces.
Using five different pieces of string, thread them through the straws of each finger. Tie a loop that your finger will go through and tie the other end to the straw at the tip of each finger and the tip of the thumb.
To make the arm more secure, hot glue strips of cardboard to the back of the arm.
Decorate if you would like!
We focused on the flexor tendons but how do you think the extensor tendons would look on the robot hand?
Question to ask yourself: If you were to build a robot hand again, is it important to base the design on the hand or can you design something different?